市场规模与现状:千亿级赛道,核心部件亟待突破!
具身智能机器人正迎来爆发式增长,预计2030年全球市场规模将突破 千亿级。作为核心执行单元,手指关节的驱动技术直接决定机器人的灵活性、精度和响应速度。然而,传统电机、液压驱动方案存在体积大、响应慢、控制复杂等瓶颈,行业亟需更高效的解决方案!
行业痛点 vs 压电陶瓷的颠覆性优势
❌ 传统方案痛点:
电机+减速器:体积大、重量高,难以实现精细操作。
气动/液压驱动:系统复杂,能耗高,维护成本大。
响应速度不足:难以满足高频触觉反馈或快速抓取需求。
✅ 压电陶瓷的突破性优势:
纳米级精度:逆压电效应直接转换电信号为机械位移,控制精度达纳米级。
毫秒级响应:高频驱动(>1kHz),远超传统电机。
高功率密度:体积小、重量轻,完美适配仿生关节紧凑设计。
零耗能自锁:断电后保持位置,节能又安全!
压电陶瓷如何选型?关键参数一览
机器人关节应用需重点关注:
动态压电系数(d₃₃*):决定位移输出能力。如我司开发的压电陶瓷材料YGP-51,其20kv/cm场强下的应变达到0.15%,满足多种应用场景对位移量的需求。
机电耦合系数(kp):>0.6。
抗疲劳性:十亿次以上的循环寿命,适应高频动作需求。
低电压驱动:多层堆叠技术(MLA)实现<100V工作电压。
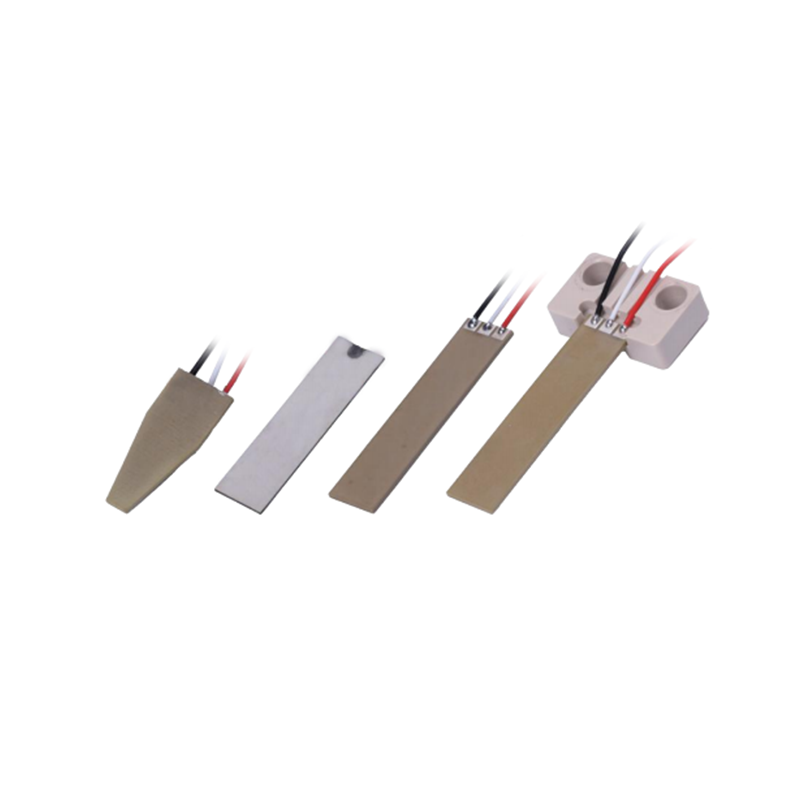
我司解决方案:为具身智能量身定制。
隐冠半导体推出关节驱动模块,直击行业痛点:
✔ 定制化PZT配方:优化d₃₃*与kp,位移输出提升30%。
✔ 独有多层共烧技术:驱动电压<60V,安全易集成。
✔ 嵌入式控制算法:解决滞后难题,重复定位精度±0.1μm。
✔ 全场景验证:已与相关厂商开展合作,累计百万次无故障运行。
为什么选择我们?
从材料到模组:一站式交付,缩短客户研发周期。
成本优化方案:相比进口品牌价格降低,国产替代首选。